
Python Point Cloud Geometric Roughness
Overview
Python implementation of the geometric roughness analysis from the CloudCompare software in Python. The original code was written in C++, and it measures roughness by creating the best fitting least square plane based on neighbouring points, where the neighbours are points that are within a certain radius of the point being analysed. From there the roughnesss is determined to be the distance the point being analysed is from the best fitting plane.
This function was recreated on python using available functions and libraries. Some of the major libraries that was used to achieve this was Laspy, Numpy, and Scipy.
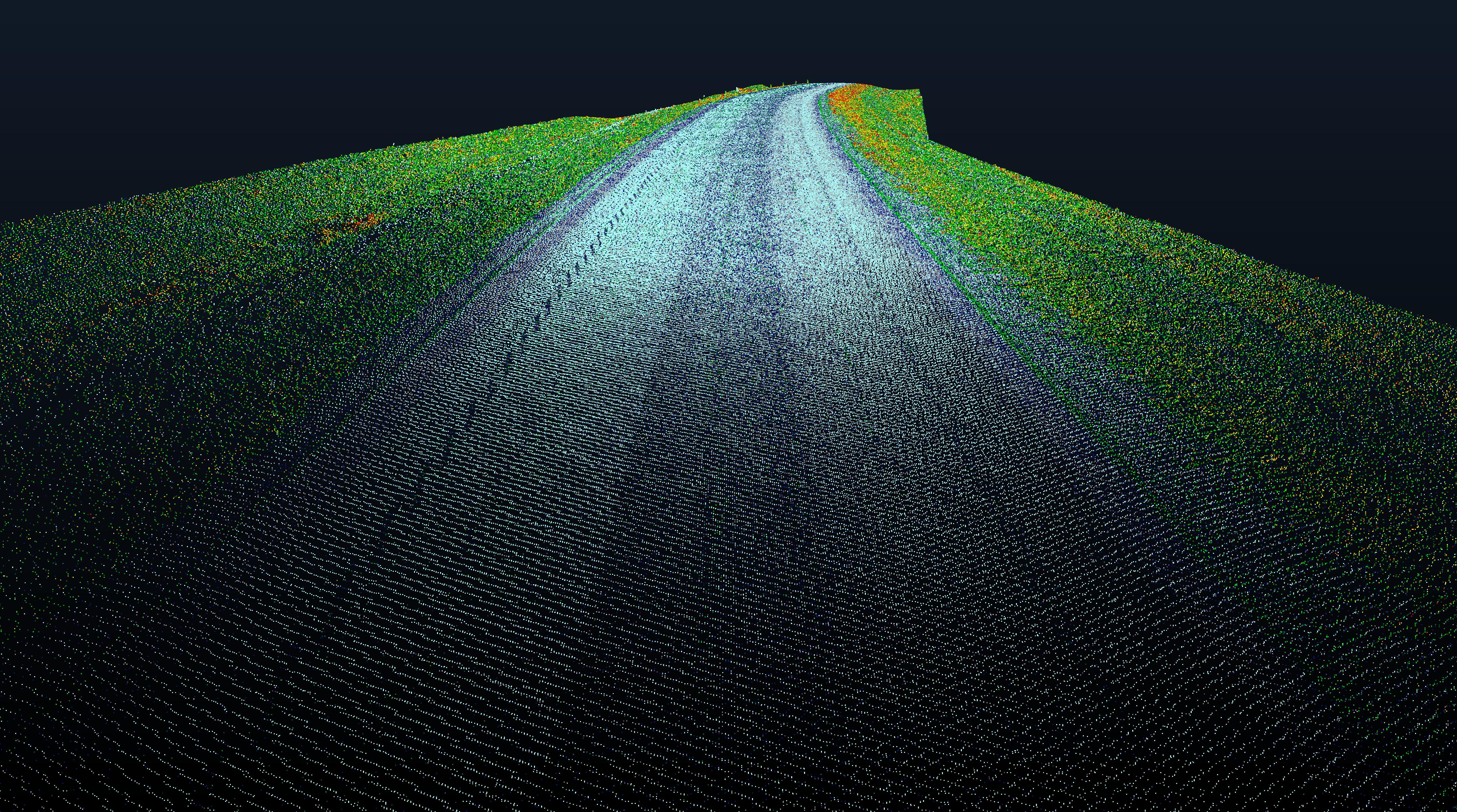
The resulting output from running Python point cloud roughness on a sample LiDAR input seen above was identical to those from the CloudCompare geometric roughness calculations.
The github repository hosting the code for this project can be found here.
Implementation
The goal of this project was to recreate the output from CloudCompare, no GUI was developed for it.
I/O
The input and output file are of .las format, a common format to store LiDAR point cloud. The library used to parse this file format was chosen to be Laspy, as it was flexible with the amount of content provided by the input file, while still being able to detect more niche fields. It also allows point cloud object to be exported to a .las file.
Roughness calculations
When calculating the geometric roughness, a method on the object is called that will create multiple processes (python multiprocessing) to calculate the roughness in parallel. Each process will iterate through every point that has been assigned to it and use a range query on a kd-tree to create a least square fitting plane around the point. The distance from the target point to this least square fitting plane built on the points returned from the range query will be taken as the geometric roughness value of that point. By using multiprocessing, we were able to speed up the processing time of the geometric roughness calculations.
To improve on the performance, threading should be used instead of multiprocessing.